深度 | 轻量级深度卷积神经网络在农业机器人中的应用
参加:Joni Chung,Xiang Chen,Nurhachu Null
最近,通过简化和准确的培训过程,深度学习变得越来越受欢迎。对于旨在将研究转化为工业应用(例如机器人)的研究人员来说,这是至关重要的需求。
在本文中开yun体育app入口登录,作者提出了一种非常新颖的方法来学习轻量级模型,该模型可以达到90%以上的精度,同时使训练速度更快地订单,并且参数的数量级较小。作者主要使用以下三个步骤:
1)。将预训练的模型调整到手头的任务中。
2)。在自适应模型中使用模型压缩技术来学习具有较少参数的轻量级深卷积神经网络(DCNN)
3)。作者将K轻质模型结合在一起,作为一种混合模型,以提高轻质模型的性能
最后,该方法用于农业机器人,并取得了良好的性能。
介绍
如今,农业机器人的使用正在稳步增长,例如图1中所示的AGBOT II [1],有助于杂草检测和分类,以及可用于检测和分割作物的Harvey [2]。当前的杂草分割方法是结合形状和像素统计特征,并使用随机的森林分类器进行分类。由于机器人平台的资源是有限的,因此很难部署深层的卷积神经网络,并且很难用有限的数据来训练深层神经网络。使用最先进的网络所需的计算能力是普通机器人负担不起的。本文在复杂性和准确性之间做出了妥协,并通过以下步骤解决了这个问题。首先,开发人员将预先训练的模型Inception-V3 [3]适应此任务。然后,他们使用模型压缩和“蒸馏”技术实现了指数降低的参数。最后,根据先前的工作[4],作者将一组K轻质模型组合为混合模型,以提高性能。

图1:上面的Agbot II,正在执行杂草管理;下面是哈维
这种方法在杂草分割方面取得了可观的结果。改编-IV3模型将准确率从85.9%提高到90.3。而且,对于具有K = 4的轻质深卷积神经网络,使用较少的参数和更快的帧速率时,它可以达到90.3%的精度,
作者对这一新颖想法的历史及其导致它的方法进行了详细的评论。它们还提供了当前学习特征和模型压缩趋势的优势和缺点的分析。这不是本文的重点,因此这里没有任何详细信息。如果您对本文感兴趣,那值得阅读。
提出的方法
新方法主要是一个三步过程,可以在速度和内存大小之间进行确切的折衷。该方法用于有效解决机器人平台(例如Agbot II)的杂草分割问题。滑动窗口的尺寸为颜色图像上的81×81×3(因为颜色图像为三个通道),并且窗口中间的像素被认为是作物或杂草。由于大多数机器人视力问题是稀疏的问题,因此不使用完全连接的神经网络(FCN)。本文中稀疏的问题是指杂草分割仅需要对含有植被的像素进行分类,因此作者对为什么他们不使用完全连接的神经网络进行了解释,该网络旨在设计(每个像素)进行设计和火车。作者使用图2来解释什么是稀疏问题。
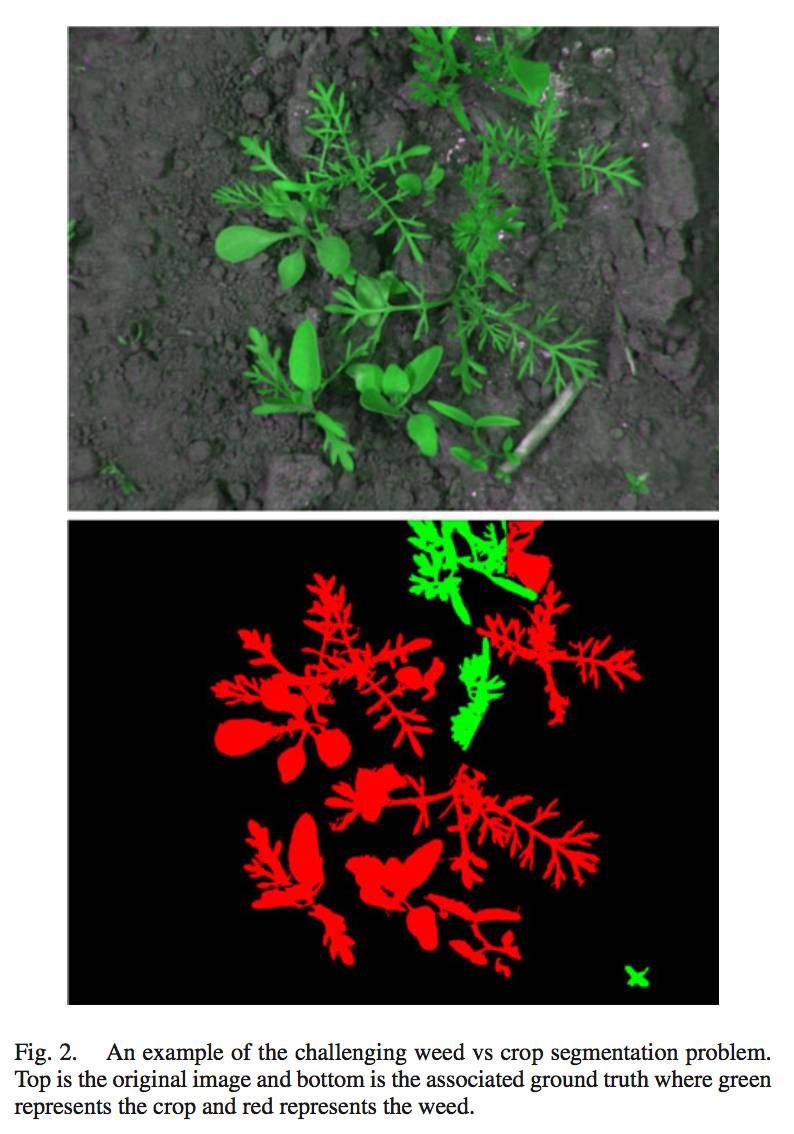
图2:具有挑战性的杂草与作物分割问题。上图是原始图像,以下是相应的事实,其中绿色代表农作物,红色代表杂草
现在,我想简要描述这三个摘要过程。
A.转移学习:适应复杂的预训练网络
就像在此示例中一样,如果您的数据有限来培训神经网络,最好的方法是采用预训练的模型并将其适应您的任务。经常使用的几个著名的预训练的网络是:VGGNET,GOOGLENET等。在本文中开yun体育官网入口登录app,作者使用了最新版本的Googlenet-Inpection-V3,这是与其他模型相比的较小模型。然后,作者重新采样了原始图像以匹配Inpection-V3模型所需的大小。
B.模型压缩:训练轻巧的深卷积神经网络
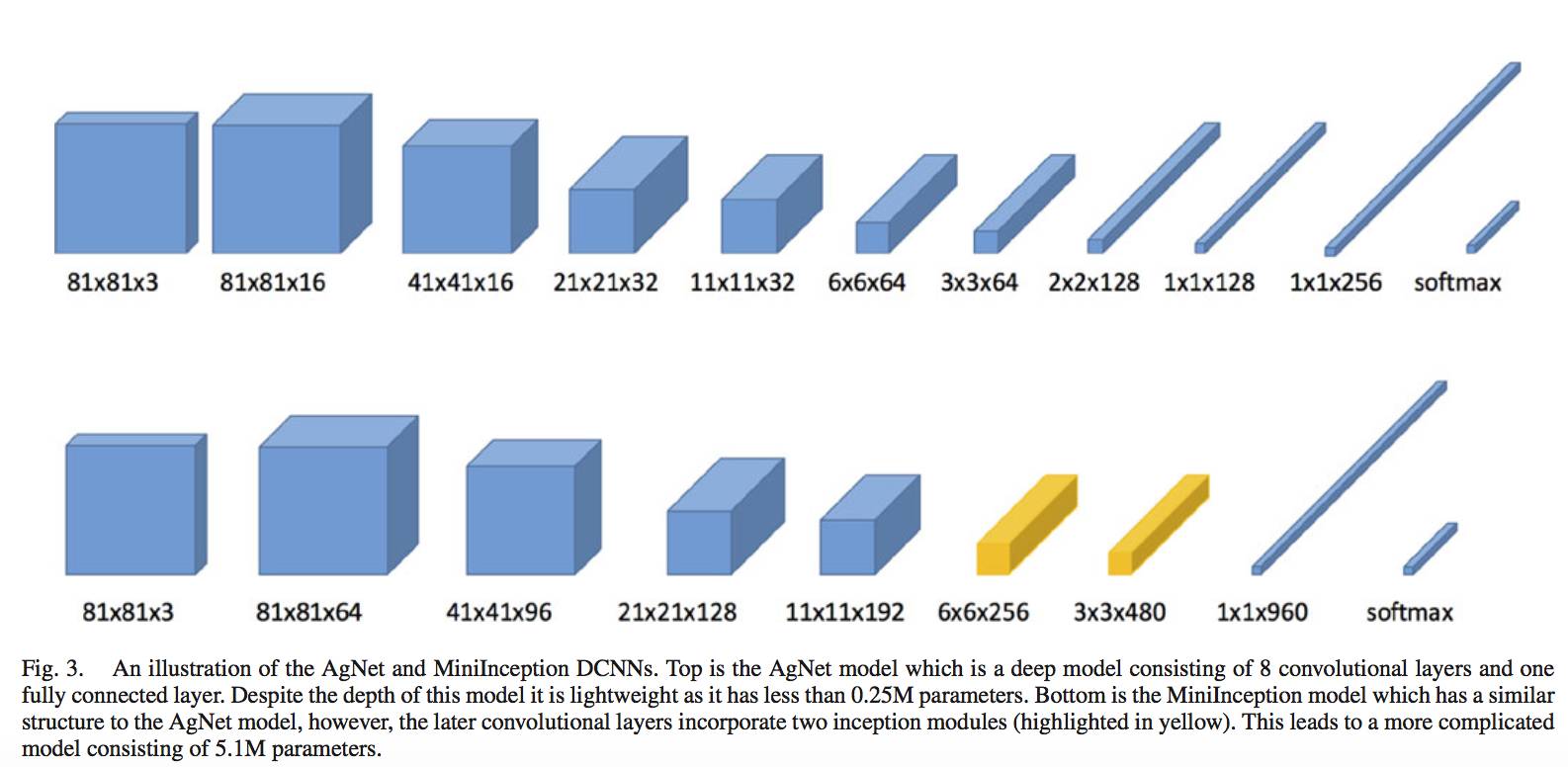
图3:Agnet和Miniinception DCNNS的描述。上面是AGNET模型,它是由8个深度卷积层和完全连接的层组成的深度模型。该模型的深度很轻,具有少于250,000个参数。以下是微型感知模型,该模型的结构与AGNET相似,但是,后者的卷积层结合了两个感知模型(图中突出显示了部分)。这使该模型更加复杂,具有510万个参数。
尽管Inception-V3具有250,000个参数(这已经比其他模型少得多),但它仍然需要模型压缩技术。在这里,过程A中的模型被用作“教师网络”,然后从中学到了轻量级的“学生深度卷积神经网络”。为了训练该模型,使用学生网络与事实之间的损失功能,以及教师网络和学生网络的逻辑输出之间的L2损失。作者认为两个潜在结构,第一个结构,其中一个包含8个卷积层和1个完全连接的层,这与Alexnet相似,您可以看到图3中的详细信息。第二个网络结构包含4个卷积层,然后是2个感知模型以及一个完全连接的层(类似于Googlenet),您可以在图3的底部看到。图4中描述了四个子模型。您可以在图4中的说明中看到详细信息。
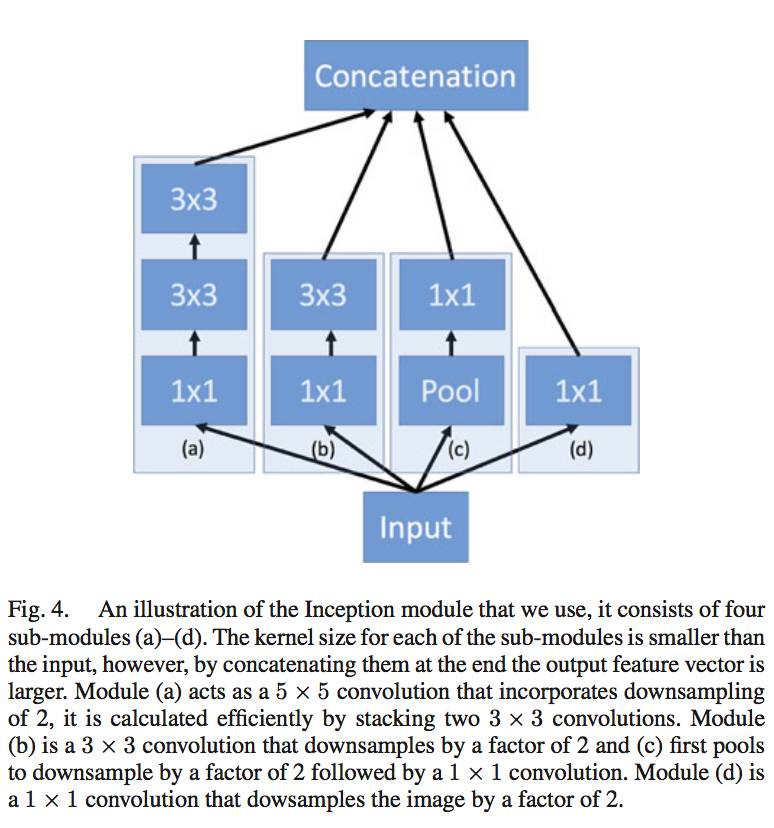
图4:我们使用的感知模型由四个子模型(a) - (d)组成
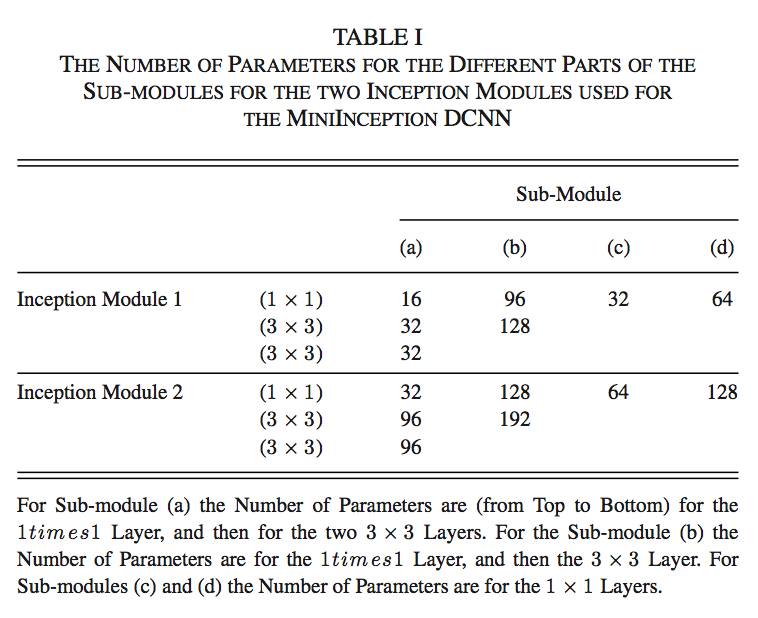
参数的详细信息如表1所示。
表I:子模型中使用的两个感知网络的参数数
C.深卷积神经网络的混合和组合
在本文中,通过结合这些轻质模型来提高性能。通过做出平均决策,它可以以较低的成本提高性能。首先,根据最大逻辑值计算占用概率:

然后,如公式2所示,我们获得了最终分类,这是相应占用概率的加权总和。

实验结果
作者使用此方法来解决机器人平台中的杂草分割问题。该模型在TensorFlow中实现。亚当优化器的参数如下
1。杂草分割的准确性
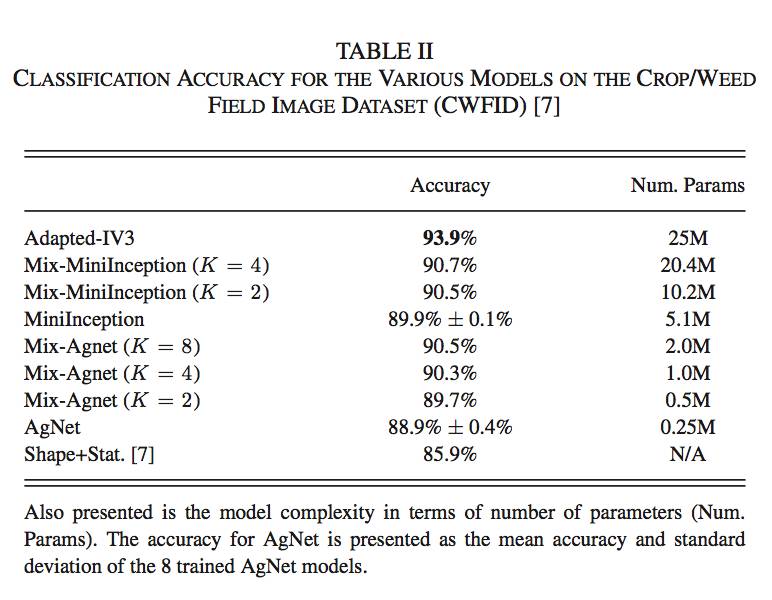
作者使用了公共培训数据和“农作物/杂草现场图像数据集(CW-FID)”,其中包括20个培训数据和40个测试数据。作者还将结果与Haug和Ostermann [5]的工作进行了比较,后者对特征进行了随机森林的培训。我们可以在表2中看到详细的结果,该结果表明,本文中提出的所有深度学习方案都比先前提出的方法更好。适应性IV3模型达到了最高的精度率,约为93.9%,而Haug和Ostermann的准确率为85.9%。
表II:CW-FID数据集上不同模型的准确性
2。轻巧的深卷积神经网络的混合物
在这里,作者还结合了多种轻型模型,例如混合型和Mix-Miniinception。与使用集合模型相比,MixDCNN方法提供了0.15%的性能提高。对于单个GPU,模型复杂性没有增加。在表II中,可以看出,通过增加K(模型数),全局性能得到了改善,但相对性能已降低。具有K = 4的Agnet DCNN是模型复杂性和准确性之间的良好折衷。在图5中,您可以看到视觉结果,描述了三个深卷积神经网络模型:agnet,mixagnet(k = 4)和改编-IV3。
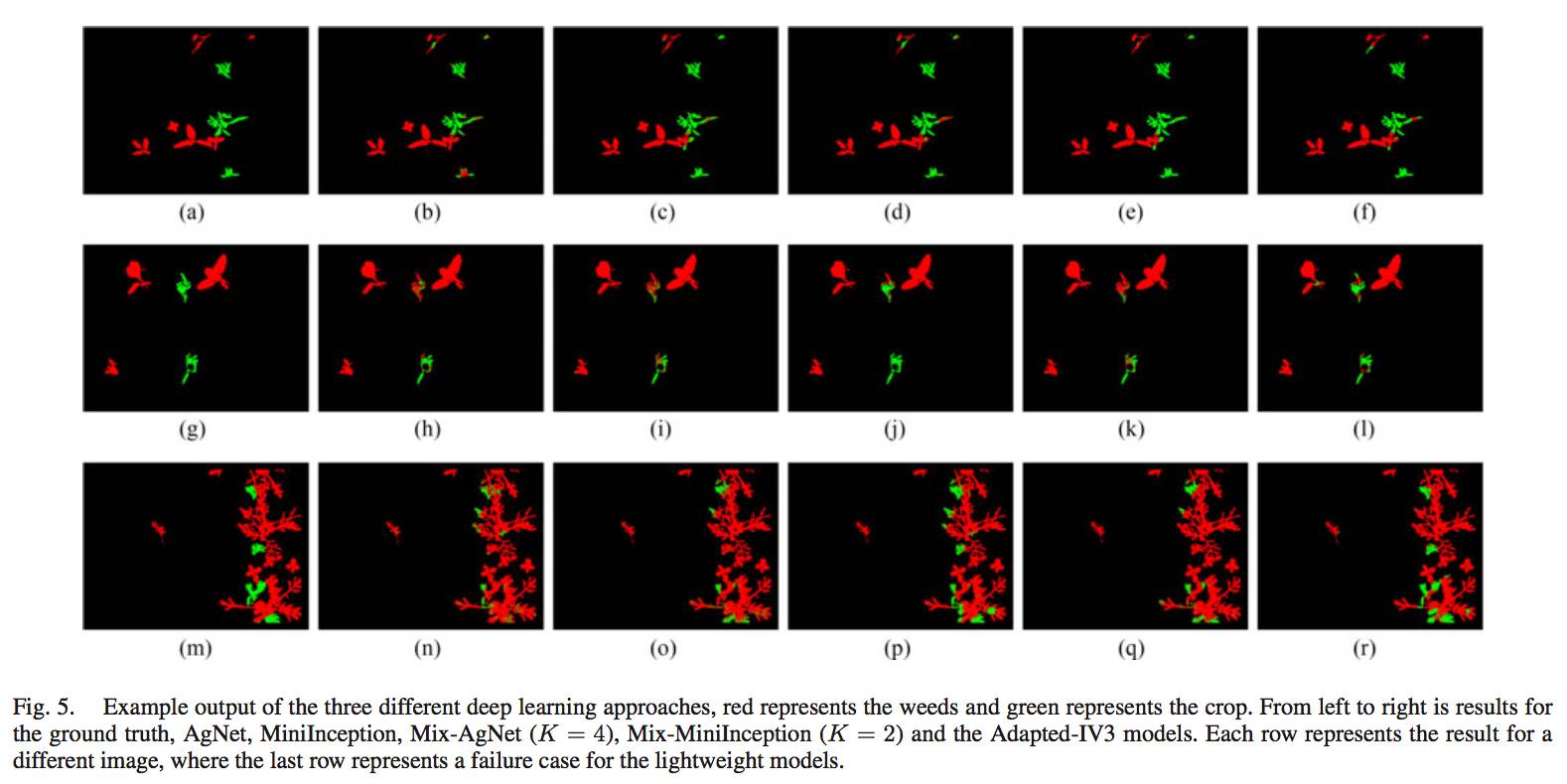
图5:三种深度学习方法的例子:红色代表杂草,绿色代表农作物。每一行是从左到右:实际结果,AGNET模型开yunapp体育官网入口下载手机版,微型感知模型,Mix-agnet(K = 4),Mix-Miniinception(K = 2)和适应性-IV3模型。每行代表不同的图片,最后一行表示失败的情况。
3。速度和模型复杂性
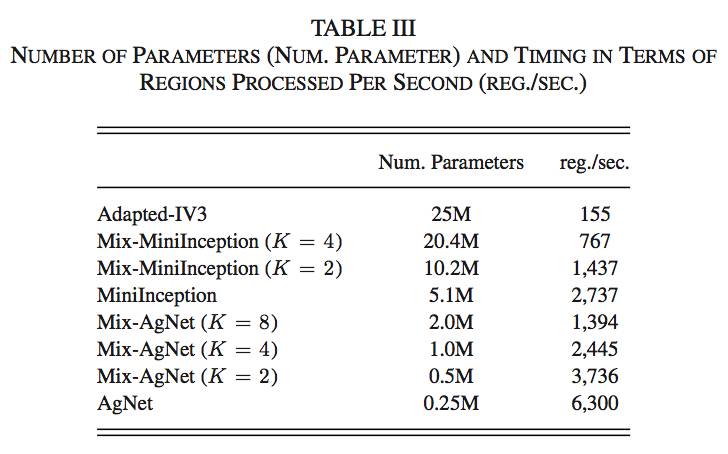
表III显示了每秒可以处理的区域数量。我们发现模型越简单,它每秒处理的区域就越多。复杂性随模型数量而增加,这减少了每秒处理的区域数量。为了维持它们之间的平衡,我们选择了在k = 4处的混合 - 鹰网模型,在k = 2处选择混合模型。我们还可以发现,考虑到速度和复杂性,AGNET,混合型和MINIINECEPTION的三种方法也有可能在机器人平台上部署。
表III:参数数量和每秒可以处理的区域数
综上所述
本文提供了一种培训在机器人平台上使用的深卷积神经网络的新方法。本文具有全面的文献综述和清晰的图表,这可以使读者更容易理解背景信息以及实施此方法的细节。尽管作者没有告诉我们他们为什么使用这种方法,但本文为我们提供了一种考虑和使用深层神经网络的新方法。正如作者在本文结尾所建议的那样,我们可以尝试更多的方法来提高绩效,但是本文的价值是它提供了可以在日常生活中接受和应用的研究结果。
参考
[1]鲍登,欧文·约翰。设计轻巧的模块化机器人车辆,用于可持续的宽孢农业。指责。昆士兰州技术大学,2015年。
[2] Lehnert,Christopher等。 “为受保护的农作物系统收获的自动甜胡椒收获。” IEEE机器人技术和自动化信2.2(2017):872-879。
[3] Szegedy,Christian等。 “重新考虑计算机视觉的启动架构。” IEEE计算机视觉和模式识别会议论文集。 2016。
[4] GE,Zongyuan等。 “通过深卷积神经网络的混合物进行细粒度的分类。”计算机视觉的应用(WACV),2016年IEEE冬季会议。 IEEE,2016年。
[5] Haug,Sebastian和JörnOstermann。 “用于评估基于计算机视觉的精确农业任务的作物/杂草图像数据集。”欧洲计算机视觉会议。 Springer International Publishing,2014年。